


அடர்த்தியான கிடங்கிற்கான ஒரு முக்கியமான போக்குவரத்து உபகரணமாக, புத்திசாலித்தனமான பாலேட் வகை நான்கு-வழி ஷட்டில் கார் என்பது ஒரு அறிவார்ந்த பாதையில் வழிகாட்டப்பட்ட தானியங்கி தலைகீழ் மற்றும் டிராக் மாற்றும் போக்குவரத்து உபகரணமாகும். மின் கட்டுப்பாட்டு அமைப்பின் கட்டுப்பாட்டின் கீழ், இது குறியாக்கிகள், RFID, ஒளிமின்னழுத்த உணரிகள் போன்ற டிஜிட்டல் தொழில்நுட்பங்கள் மூலம் ஒவ்வொரு உள்ளீடு மற்றும் வெளியீட்டு நிலையத்தையும் துல்லியமாகக் கண்டறிந்து, அறிவார்ந்த திட்டமிடல் அமைப்பைக் கொண்டுள்ளது. பொருட்களைப் பெற்ற பிறகு, அது தானாகவே போக்குவரத்திற்காக முன்னும் பின்னுமாக செல்கிறது. பாலேட் நான்கு-வழி காருக்கு மனித செயல்பாடு தேவையில்லை, வேகமாக இயங்கும் வேகம் மற்றும் உயர் மட்ட நுண்ணறிவு, பல்வேறு தளவாட சேமிப்பு அமைப்புகளுக்கு ஏற்றது, யூனிட் பொருட்களின் தட்டையான தானியங்கி போக்குவரத்தை விரைவாக உணர ஊக்குவிக்கும். புத்திசாலித்தனமான திட்டமிடல் அமைப்புகளால் உந்தப்பட்டு, பல அடுக்கு மற்றும் பல வாகன ஒத்துழைப்பு இணையான செயல்பாடுகள் துல்லியமான மற்றும் திறமையான செயல்பாட்டு முறைகளை அடைய செயல்படுத்தப்படுகின்றன, இது நிறுவன தளவாட சேமிப்பு அமைப்புகளுக்கு புதிய தளவாட தீர்வுகளை வழங்குகிறது.
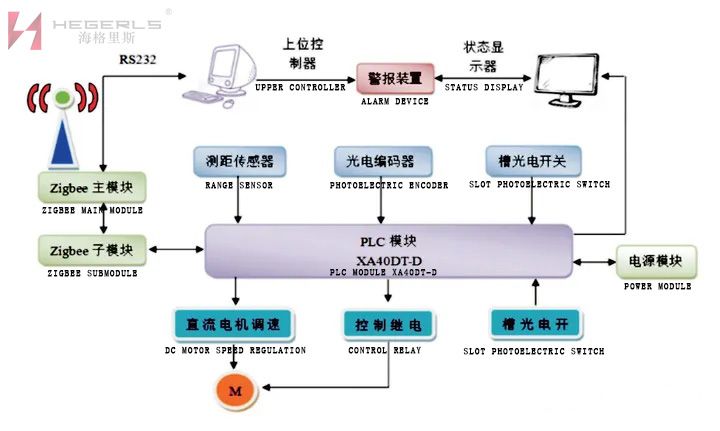
புத்திசாலித்தனமான தட்டு நான்கு வழி ஷட்டில் வாகன சேமிப்பு அமைப்பை செயல்படுத்துவதில் உள்ள முக்கிய சிரமங்கள் மற்றும் முக்கிய புள்ளிகள் வன்பொருள் நம்பகத்தன்மை, தகவல் தொடர்பு மற்றும் பொருத்துதல் தொழில்நுட்பம், திட்டமிடல் அமைப்பு, முதலியன. குறிப்பாக, வன்பொருள் நம்பகத்தன்மையின் அடிப்படையில், Hebei Woke HEGERLS முக்கியமாக தயாரிப்பு நம்பகத்தன்மையை அடைகிறது. மூன்று அம்சங்களில் இருந்து. முதலாவதாக, வாகனத்தின் செயல்பாட்டின் நிகழ்நேர கண்காணிப்பை உறுதி செய்வதற்காக 16 சென்சார்கள் வாகனத்தின் உடலில் கட்டமைக்கப்பட்டுள்ளன; அடுத்து, கட்டுப்பாட்டு நிலைத்தன்மையை மேம்படுத்த, Siemens s7-200 SMATER தொடரிலிருந்து நிலையான PLC ஐத் தேர்ந்தெடுக்கவும். கூடுதலாக, HEGERLS பேலட் நான்கு வழி விண்கலம் ஒரு மட்டு வடிவமைப்பை முழுவதுமாக ஏற்றுக்கொள்கிறது, இது கூறுகள் தோல்வியடையும் போது அவற்றை மாற்றுவதற்கு மிகவும் வசதியாகவும் திறமையாகவும் இருக்கும். அதே நேரத்தில், மற்ற சிறிய கார்கள் ஆதரவை வழங்குவதற்கு வசதியாக உள்ளது. அனைத்து கட்டமைப்பு கூறுகளும் ஹெபே வோக்கால் சுயாதீனமாக உருவாக்கப்பட்டு தயாரிக்கப்படுகின்றன, தரம் மற்றும் துல்லியத்தை கண்டிப்பாக கட்டுப்படுத்துகின்றன.
தகவல்தொடர்பு மற்றும் பொருத்துதல் தொழில்நுட்பத்தைப் பொறுத்தவரை, உயர் அடர்த்தி பொருட்கள் மற்றும் அலமாரிகள் பொதுவாக தகவல் தொடர்பு சமிக்ஞைகளின் பரிமாற்றத்தில் குறுக்கிடுகின்றன, இதனால் பேலட் நான்கு வழி விண்கலம் மற்றும் அதன் அமைப்பின் தரவு பரிமாற்ற செயல்திறனை பாதிக்கிறது, இது துல்லியமற்ற நிலைப்படுத்தல் மற்றும் நிலை இழப்புக்கு வழிவகுக்கிறது. வெவ்வேறு உண்மையான சூழ்நிலைகளின்படி, ஹெபி வோக் குறியாக்கி பொருத்துதல், லேசர் பொருத்துதல், பார்கோடு/இரு பரிமாண குறியீடு பொருத்துதல், RFID பொருத்துதல் மற்றும் பிற பொருத்துதல் முறைகளை கிடங்கில் உள்ள நான்கு வழி ஷட்டில் வாகனங்களின் தடையற்ற ரோமிங்கை உணர்ந்து, குறுக்கீடு எதிர்ப்பை மேம்படுத்துகிறது. வாகனத்தின் திறன், அது தானாகவே சமநிலையை ஏற்றுவதற்கு உதவுகிறது, இதனால் தோல்வியின் ஒற்றை புள்ளியை நீக்குகிறது.
திட்டமிடல் அமைப்புகளைப் பொறுத்தவரை, பல வாகனத் திட்டமிடல் முறையைச் செயல்படுத்துவதன் மூலம் மட்டுமே நான்கு வழி ஷட்டில் வாகனங்களின் பொருந்தக்கூடிய தன்மையை பெரிதும் மேம்படுத்த முடியும். HEGERLS நான்கு வழி விண்கலம் பல வாகன திட்டமிடல் அமைப்பு நான்கு அம்சங்களை உள்ளடக்கியது: விண்வெளி போக்குவரத்து கட்டுப்பாடு, பணி ஒதுக்கீடு, உபகரண செயல்பாட்டு தோல்வி பகுப்பாய்வு மற்றும் பாதை திட்டமிடல்.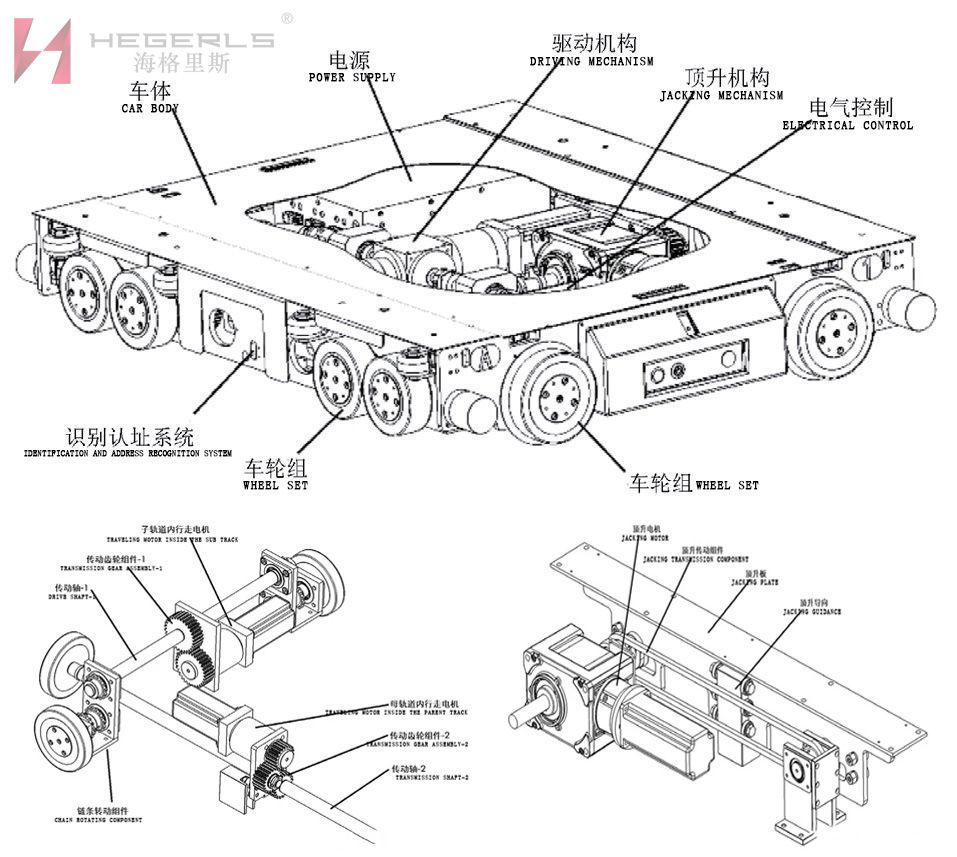
ஹெபெய் வோக்கால் சுயாதீனமாக உருவாக்கப்பட்டு தயாரிக்கப்பட்ட HEGERLS பாலேட் நான்கு வழி ஷட்டில் காரின் ஒட்டுமொத்த பொறிமுறை வடிவமைப்பும் மற்ற உற்பத்தியாளர்களிடமிருந்து வேறுபட்டது. HEGERLS பாலேட் நான்கு வழி ஷட்டில் காரின் முக்கிய பொறிமுறை வடிவமைப்பு பின்வருமாறு:
பணித் தேவைகளின்படி, ஓடும் பாதையின் மூலம் அலமாரிகளின் வெவ்வேறு அடுக்குகள் மற்றும் சரக்கு பாதைகளில் செயல்பாட்டு பணிகளை முடிக்க, நான்கு வழி வாகனம் பரஸ்பர உயர்த்தியுடன் ஒத்துழைக்கிறது. கிடங்கு கண்காணிப்பு அமைப்பின் கட்டுப்பாடு மற்றும் திட்டமிடலின் கீழ், முழு அடர்த்தியான கிடங்கு பல அடுக்கு மற்றும் பல வாகன ஒரே நேரத்தில் செயல்பாட்டை அடைய முடியும். ஒவ்வொரு நான்கு வழி வாகனமும் செயல்பாட்டின் போது தகவல் மேலாண்மை அமைப்பில் இருப்பிடம், வேகம், மின்சாரம், கிடைக்கும் தன்மை, தவறுகள் மற்றும் வேலை நிலைமைகள் போன்ற தகவல்களை பதிவேற்றலாம்; நான்கு வழி வாகனமானது மொத்த சேமிப்பு மற்றும் மீட்டெடுப்பு, சரக்கு இயக்கம் மற்றும் தட்டு எண்ணுதல் போன்ற செயல்பாடுகளைக் கொண்டுள்ளது, விரைவான பொருள் விநியோகம் மற்றும் சரக்கு மேலாண்மை ஆகியவற்றை செயல்படுத்துகிறது; இது உள்நாட்டில் தடைகளைத் தவிர்க்கும் செயல்பாடு மற்றும் தவறான எச்சரிக்கை உடனடி செயல்பாடு ஆகியவற்றைக் கொண்டுள்ளது, இது பாதுகாப்புப் பாதுகாப்பையும் தவறான தகவலின் சரியான நேரத்தில் பின்னூட்டத்தையும் வழங்கும். வன்பொருள் அமைப்பின் கண்ணோட்டத்தில், நான்கு வழி வாகனம் முக்கியமாக சட்டகம், தூக்கும் பொறிமுறை, ஓட்டுநர் பொறிமுறை, சக்கரக் குழு, மின்சாரம், மின் கட்டுப்பாடு போன்ற கூறுகளைக் கொண்டுள்ளது.
1) வாகன அமைப்பு
உயர்தர எஃகு இணைப்பதன் மூலம் உருவாக்கப்பட்ட நான்கு வழி வாகனத்தின் உடல் அமைப்பில் மட்டு வடிவமைப்பு தொழில்நுட்பம் பயன்படுத்தப்படுகிறது. வாகனத்தின் வடிவமைக்கப்பட்ட சுமை திறன் 1500 கிலோ அல்லது அதற்கும் அதிகமாக உள்ளது, மேலும் குறைந்தபட்ச பாதுகாப்பு காரணி 1.6 ஆக இருக்க பரிந்துரைக்கப்படுகிறது. பொருள் மகசூல் வலிமை 2.75 MPa; நான்கு வழி வாகன உடல் அமைப்பு முழு வாகனத்தின் நம்பகத்தன்மை மற்றும் கட்டமைப்பின் இலகுரக ஆகியவற்றிற்கு உகந்ததாக உள்ளது.
2) ஜாக்கிங் மெக்கானிசம்
நான்கு வழி வாகன இயக்கத்திற்கு பல மேல்-கீழ் மற்றும் தலைகீழ் செயல்கள் தேவை, மேலும் ஒரு இயந்திர பொறிமுறை அல்லது ஹைட்ராலிக் மேல்-கீழ் சாதனம் வடிவமைக்கப்பட வேண்டும். இயந்திர கட்டமைப்பின் பாதுகாப்பு, நம்பகத்தன்மை மற்றும் ஆயுள் ஆகியவற்றைக் கருத்தில் கொண்டு, 40 மிமீ தூக்கும் பக்கவாதம் மற்றும் 3-5 வினாடிகள் தூக்கும் நேரம் பரிந்துரைக்கப்படுகிறது. நான்கு வழி வாகனம், தட்டுகளைத் தூக்கி, இறக்கி, பொருட்களைத் தூக்குவதைத் திருப்புவதன் மூலம் ஒரு செயல்பாட்டுச் சுழற்சியை நிறைவு செய்கிறது. செயல்பாட்டுத் திறனை மேம்படுத்த, செயல்பாட்டுச் சுழற்சியைக் குறைக்க, செயல்பாட்டுச் செயல்பாட்டின் போது நான்கு வழி வாகனம் விரைவாகத் தாழ்ந்து, தலைகீழாக மாறுவதை உறுதி செய்வது அவசியம்.
3) இயக்கி பொறிமுறை மற்றும் சக்கரங்கள்
நான்கு வழி வாகனம் ஓட்டும் பொறிமுறையானது, இரு திசைகளிலும் விரைவான பரிமாற்றத்தை ஊக்குவிக்க, ஒரு சர்வோ மோட்டார் டிரைவ், கோளக் குறைப்பு மற்றும் கம்யூடேட்டரைப் பயன்படுத்துகிறது. சாதாரண இயக்க நிலைமைகளின் கீழ், சுமை இல்லாத இயக்க வேகம் 1.4 m/s~1.6 m/s, மற்றும் முழு சுமை இயக்க வேகம் 1.0 m/s~1.2 m/s ஆகும்; ஷெல்ஃப் மட்டத்தில் கிடைமட்டமாக இயங்கும் போது, நான்கு வழி வாகனம் X திசையில் 4-வீல் டிரைவையும் Z திசையில் 8-வீல் டிரைவையும் ஏற்றுக்கொள்கிறது. 8-சக்கரம் (ஓட்டுநர் மற்றும் இயக்கப்படும் சக்கரங்களின் சேர்க்கை) டிரான்ஸ்மிஷன் பயன்முறையானது கணினி வடிவமைப்பு தேவைகளைப் பூர்த்தி செய்யத் தேர்ந்தெடுக்கப்பட்டது, உள் இயந்திர அமைப்பின் சிக்கலைக் குறைக்கும் போது வாகனத்தின் நடைப்பயணத்தின் நிலைத்தன்மையை உறுதி செய்கிறது. நான்கு வழி கார் இயக்கத்தில் இருக்கும் போது, அதன் சக்கரங்கள் நீண்ட கால உராய்வுக்கு உட்பட்டு, அணிய-எதிர்ப்பு சக்கரங்கள் தேவைப்படுகின்றன. செயல்திறன் சோதனைக்குப் பிறகு, பாலியூரிதீன் சக்கரங்கள் ஆயுள், சத்தத்தை குறைத்தல் மற்றும் செயல்பாட்டு நிலைத்தன்மையை உறுதி செய்வதற்கு தேர்ந்தெடுக்கப்படுகின்றன.

Hagrid HEGERLS பேலட் நான்கு வழி விண்கலத்தின் நெகிழ்வான பல அடுக்கு மற்றும் பல வாகன இயக்க முறையானது உள்வரும் மற்றும் வெளிச்செல்லும் செயல்பாடுகளின் செயல்திறனை பெரிதும் மேம்படுத்துகிறது, பாரம்பரிய முப்பரிமாண கிடங்குகளின் இடையூறு பிரச்சனையை தீர்க்கிறது. . சமீபத்திய ஆண்டுகளில், உள்நாட்டு மற்றும் வெளிநாட்டுக் கிடங்கு சந்தைகளின் உண்மையான தேவைகளின் அடிப்படையில், ஹெபெய் வோக் புதிய தோற்றம், முழுமையான செயல்பாடுகள், பாதுகாப்பு மற்றும் நம்பகத்தன்மை போன்ற தொழில்நுட்ப நன்மைகளுடன் பாலேட் நான்கு வழி ஷட்டில் கார்களை உருவாக்கியுள்ளது. உள்நாட்டு மற்றும் வெளிநாட்டு விற்பனைக்குப் பிந்தைய சேவை அமைப்புகளுக்கு மேலதிகமாக, எதிர்காலத்தில், Hebei Woke அறிவார்ந்த கிடங்கு வளர்ச்சியின் வலுவான வேகத்தை உறுதியாகப் புரிந்து கொள்ளும், வாடிக்கையாளர்களின் தேவை நோக்குநிலையை எப்போதும் கடைப்பிடிக்கும், மேலும் வாடிக்கையாளர்களுக்கு உயர் நுண்ணறிவு மற்றும் முடிவெடுப்பதைத் தொடர்ந்து கொண்டு வரும். கிடங்கு ஒட்டுமொத்த தீர்வு.
இடுகை நேரம்: மே-19-2023