



கிடங்கில் பல்வேறு வகையான சேமிப்பு அலமாரிகள் உள்ளன, மேலும் சேமிப்பு மற்றும் மீட்டெடுப்பு முறைகள் முக்கியமாக பின்வரும் வகைகளாக பிரிக்கப்படுகின்றன, இதில் கையேடு சேமிப்பு மற்றும் மீட்டெடுப்பு, ஃபோர்க்லிஃப்ட் சேமிப்பு மற்றும் மீட்டெடுப்பு, மற்றும் தானியங்கி சேமிப்பு மற்றும் மீட்டெடுப்பு ஆகியவை அடங்கும். இப்போதெல்லாம், பல நிறுவனங்கள் தானியங்கி கிடங்கு செயல்பாட்டை உணர விரும்புகின்றன, எனவே அவை தானியங்கு கிடங்கு அலமாரிகளைப் பயன்படுத்த விரும்புகின்றன. எடுத்துக்காட்டாக, நான்கு வழி கார் ரேக் என்பது ஒரு வகையான தானியங்கு சேமிப்பு ரேக் ஆகும். நான்கு வழி விண்கலம் AGV எவ்வாறு கிடங்கிற்குள் நுழைந்து வெளியேறுகிறது? கிடங்கு ஹெவி ஷெல்ஃப் உற்பத்தி ஆலை ஹைகிரிஸ் பகுப்பாய்வு செய்தது.

நான்கு வழி ஷட்டில் கிடங்கு
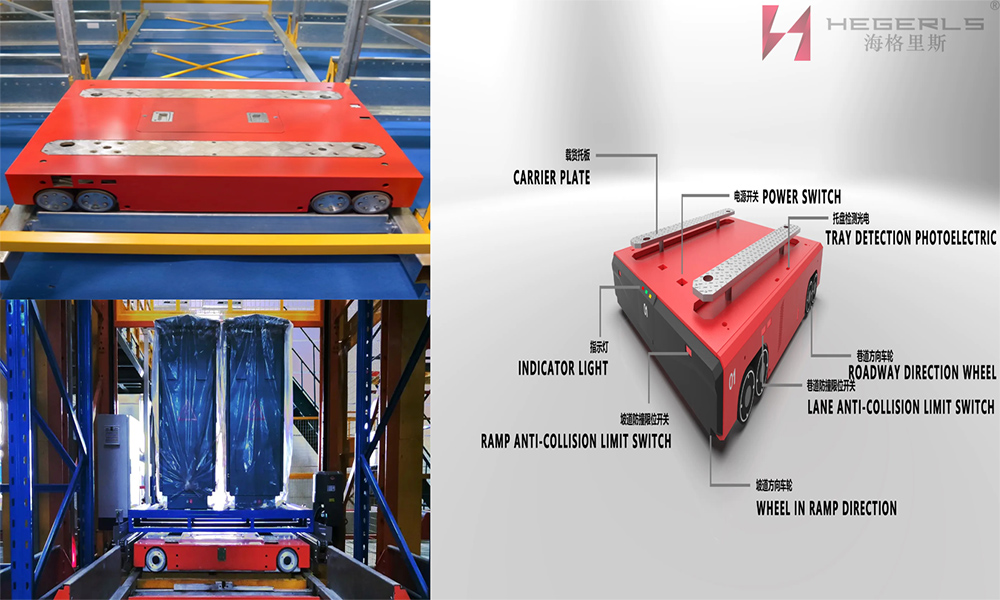
நான்கு வழி ஷட்டில் காரில் 12 சக்கரங்கள் பொருத்தப்பட்டுள்ளன, இது டிராக் விமானத்தில் நான்கு திசைகளிலும் பயணிக்கலாம் மற்றும் கிடங்கு விமானத்தில் எந்த சரக்கு இடத்தையும் சுதந்திரமாக அடையலாம். நான்கு வழி விண்கலம் ஒரே நேரத்தில் இருபுறமும் உள்ள சக்கரங்களால் இயக்கப்படுகிறது, இது செயல்பாட்டின் போது கார் உடல் திசைதிருப்பப்படாமல் இருப்பதை உறுதிசெய்கிறது, மேலும் இது முப்பரிமாண அலமாரியில் நீளமான மற்றும் குறுக்கு தண்டவாளங்களில் மாறி மாறி இயக்க முடியும்.

அதே நேரத்தில், நான்கு வழி விண்கலம் என்பது ஒரு அறிவார்ந்த கையாளுதல் சாதனமாகும், இது நீளமாக மட்டுமல்ல, பக்கவாட்டாகவும் நடக்க முடியும். நான்கு வழி விண்கலம் அதிக நெகிழ்வுத்தன்மையைக் கொண்டுள்ளது, வேலை செய்யும் சாலையை விருப்பப்படி மாற்றலாம் மற்றும் ஷட்டில் கார்களின் எண்ணிக்கையை அதிகரிப்பதன் மூலம் அல்லது குறைப்பதன் மூலம் அமைப்பின் திறனை சரிசெய்யலாம். தேவைப்பட்டால், பணிபுரியும் வாகனக் குழுவின் திட்டமிடல் பயன்முறையை நிறுவுவதன் மூலம் கணினியின் உச்ச மதிப்புக்கு பதிலளிக்க முடியும், நுழைவு மற்றும் வெளியேறும் செயல்பாடுகளின் இடையூறுகளைத் தீர்ப்பது, மேலும் ஒரு விண்கலம் அல்லது லிஃப்ட் தோல்வியுற்றால், மற்றொன்று மாற்றப்படலாம். விண்கலம் அல்லது லிஃப்ட்களை அனுப்புதல் அமைப்பு மூலம் அனுப்பப்பட்டு, கணினியின் திறனைப் பாதிக்காமல் செயல்பாட்டைத் தொடர்ந்து முடிக்க முடியும். இந்த சாதனம் குறைந்த ஓட்டம் மற்றும் அதிக அடர்த்தி சேமிப்பு, அதிக ஓட்டம் மற்றும் அதிக அடர்த்தி சேமிப்பு ஆகிய இரண்டிற்கும் ஏற்றது. இது அதிக செயல்திறன், செலவு மற்றும் வளங்களை அடைய முடியும்.
நான்கு வழி விண்கலம் AGV எவ்வாறு கிடங்கிற்குள் நுழைந்து வெளியேறுகிறது?

1) கிடங்கு முறை
அ) புத்திசாலித்தனமான நான்கு வழி விண்கலத்தின் தொழில்நுட்ப வல்லுநர்கள் முதலில் அறிவார்ந்த நான்கு வழி விண்கலத்தை இயக்கி அதைத் தயார் செய்கிறார்கள். அறிவார்ந்த நான்கு வழி விண்கலம் தயார் நிலையில் உள்ளது;
b) புத்திசாலித்தனமான நான்கு வழி விண்கலத்தின் தேர்வு இடத்தை உறுதிசெய்த பிறகு, புத்திசாலித்தனமான நான்கு வழி விண்கலத்தின் தற்போதைய இருப்பிடம் மற்றும் இலக்கு இருப்பிடத்திற்கு ஏற்ப WCS ஓட்டுநர் பாதையைத் திட்டமிடும், பின்னர் ஊழியர்கள் அறிவார்ந்த நான்கு வழிகளுக்கு பொருட்களை விநியோகிப்பார்கள். WCS மூலம் விண்கலம்;
c) பெறப்பட்ட பணி கட்டளையின்படி அறிவார்ந்த நான்கு வழி விண்கலம் விநியோகப் பணியை மேற்கொள்ளத் தொடங்குகிறது;
ஈ) கடக்கும் பாதையில், அறிவார்ந்த நான்கு வழி விண்கலம் உண்மையான தூரம் வழியாக இடப்பெயர்ச்சி முறையில் பயணிக்கிறது. ஓட்டும் செயல்பாட்டின் போது, வாகனத்தின் கீழ் பகுதி கடந்து செல்லும் தடங்களை இது தொடர்ந்து ஸ்கேன் செய்கிறது. அது கடந்து செல்லும் ஒவ்வொரு கிராசிங் நிலையும், தடங்களை ஸ்கேன் செய்வதன் மூலம் அது பயணிக்கும் தூரத்தை தீர்மானிக்கிறது மற்றும் அளவீடு செய்கிறது. அது செல்லுமிடத்திற்கு அருகில் இருக்கும் போது, பார்க்கிங் நிலையை துல்லியமாக நிலைநிறுத்துவதற்கு பக்கவாட்டு லேசர் சென்சார் மூலம் பார்க்கிங் நிலையை நன்றாக மாற்றுகிறது;
e) துணை சேனலில், புத்திசாலித்தனமான நான்கு வழி விண்கலம் குறுக்கு பாதை மற்றும் பக்க அளவுத்திருத்த கண்ணாடி பிரதிபலிப்பாளரை ஸ்கேன் செய்யலாம், புள்ளி நிலையை ஸ்கேன் செய்வதன் மூலம் ஓட்டுநர் தூரத்தை தீர்மானிக்கவும் மற்றும் இலக்கை அடைய துணை சேனலில் துல்லியமான நிலைப்படுத்தல் கட்டுப்பாட்டை அடையவும் முடியும்;
f) புத்திசாலித்தனமான நான்கு-வழி விண்கலம் தேர்ந்தெடுக்கப்பட்ட பிக்கிங் நிலைக்கு வரும்போது, தட்டு கீழே விழுந்து, சரக்குகள் அலமாரியில் வைக்கப்படும், மேலும் டெலிவரி பணி முடிந்ததும் WCS அமைப்புக்கு அறிவிக்கப்படும்;
g) புத்திசாலித்தனமான நான்கு வழி விண்கலம் தொடர்ந்து பணி வழிமுறைகளைப் பெறுகிறது அல்லது காத்திருப்புப் பகுதிக்குத் திரும்புகிறது.
2) விநியோக முறை
அ) புத்திசாலித்தனமான நான்கு வழி விண்கலத்தின் தொழில்நுட்ப வல்லுநர்கள் முதலில் அறிவார்ந்த நான்கு வழி விண்கலத்தை இயக்கி அதைத் தயார் செய்கிறார்கள். அறிவார்ந்த நான்கு வழி விண்கலம் தயார் நிலையில் உள்ளது;
b) புத்திசாலித்தனமான நான்கு-வழி விண்கலம் தேர்ந்தெடுக்கும் இடத்தை உறுதிசெய்த பிறகு, புத்திசாலித்தனமான நான்கு-வழி விண்கலத்தின் தற்போதைய இருப்பிடம் மற்றும் இலக்கு இருப்பிடத்திற்கு ஏற்ப WCS ஓட்டுநர் பாதையைத் திட்டமிடும், பின்னர் பணியாளர்கள் தேர்வு செய்யும் பணியை அறிவார்ந்த நால்வருக்கு அனுப்புவார்கள். WCS வழியாக -வே ஷட்டில்;
c) பெறப்பட்ட பணி கட்டளையின்படி அறிவார்ந்த நான்கு வழி விண்கலம் பொருட்களை எடுக்கத் தொடங்குகிறது;
ஈ) கடக்கும் பாதையில், அறிவார்ந்த நான்கு வழி விண்கலம் உண்மையான தூரம் வழியாக இடப்பெயர்ச்சி முறையில் பயணிக்கிறது. ஓட்டும் செயல்பாட்டின் போது, வாகனத்தின் கீழ் பகுதி கடந்து செல்லும் தடங்களை இது தொடர்ந்து ஸ்கேன் செய்கிறது. அது கடந்து செல்லும் ஒவ்வொரு கிராசிங் நிலையும், தண்டவாளங்களை ஸ்கேன் செய்வதன் மூலம் அது பயணிக்கும் தூரத்தை தீர்மானிக்கிறது மற்றும் சரிபார்க்கிறது. இலக்கை நெருங்கும் போது, துல்லியமான பொருத்துதல் கட்டுப்பாடு மற்றும் பார்க்கிங் ஆகியவற்றை அடைய பக்கவாட்டு லேசர் சென்சார் மூலம் பார்க்கிங் நிலையை நன்றாக மாற்றுகிறது;
e) துணை சேனலில், புத்திசாலித்தனமான நான்கு வழி ஷட்டில் கார் குறுக்கு பாதை மற்றும் பக்க அளவுத்திருத்த கண்ணாடி பிரதிபலிப்பான் ஆகியவற்றை ஸ்கேன் செய்கிறது, இந்த புள்ளிகளை ஸ்கேன் செய்வதன் மூலம் டிரைவிங் தூரத்தை தீர்மானிக்கிறது மற்றும் இலக்கை அடைய துணை சேனலில் உள்ள துல்லியமான நிலைப்பாட்டின் கட்டுப்பாட்டை உணர்கிறது. .
இடுகை நேரம்: செப்-19-2022